1. Policy
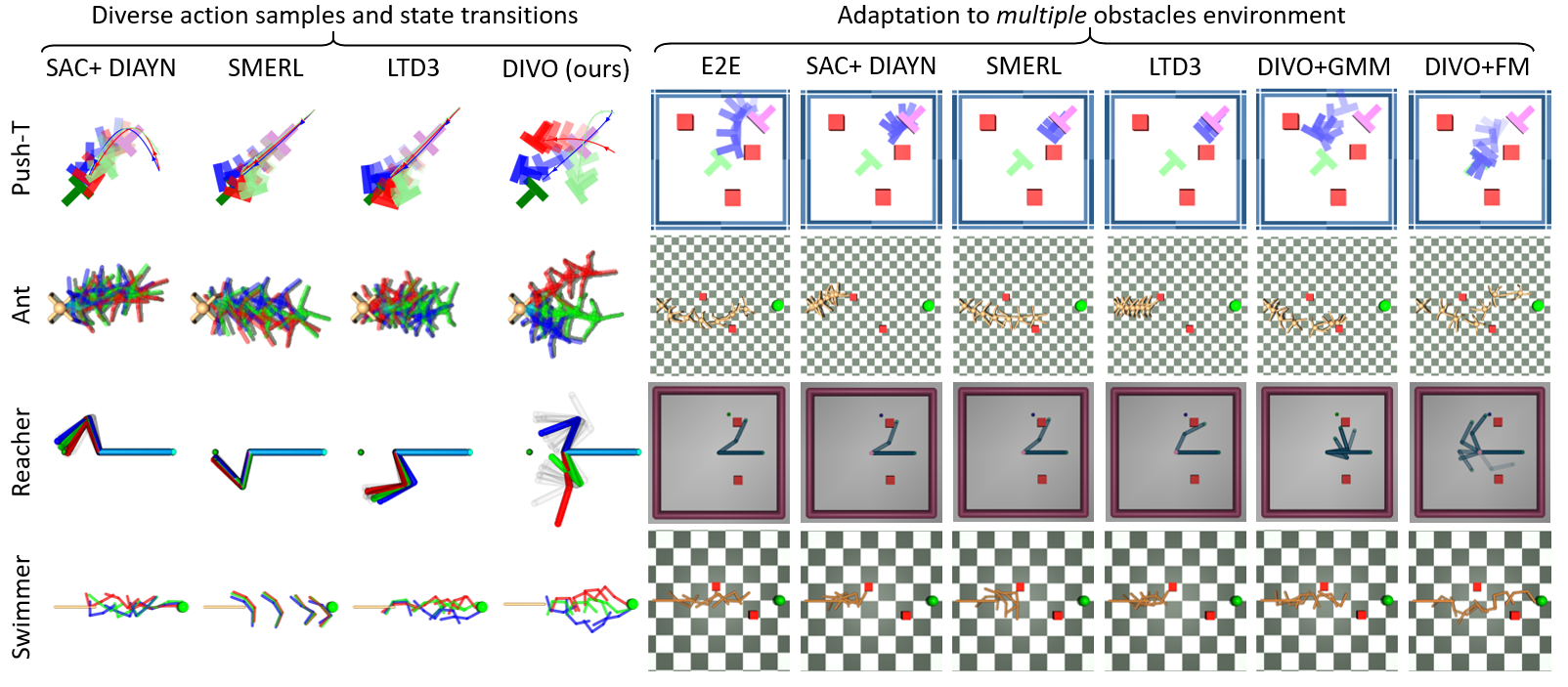
Our policy is designed to generate diverse actions in response to dynamically changing environments. It learns from random obstacle deployment during training to create a rich set of action strategies.
2. Motion Predictor
The motion predictor forecasts state trajectories, enabling the system to evaluate the feasibility of actions in real-time. It ensures safe and effective adaptation to dynamic obstacles.
3. Latent Skill Sampler
The latent skill sampler produces diverse skill variables conditioned on the current state. It leverages state-dependent distributions to enhance adaptability and action diversity.